 |
||
咨询QQ: 杂志订阅 编辑 网管 培训班 市场部 发行部 杂志订阅 编辑 网管 培训班 市场部 发行部电话服务:  010-82024981 010-82024981 | ||
 |
||


1 概述
UPS领域内近年来一直争论不休的一个问题:静止变换式UPS和飞轮储能式UPS,哪种模式更适用于数据中心?
在飞轮储能式中的惯量方程式为
![]()
式中:J为飞轮转动的惯量,ω为飞轮旋转的角速度。
可以在停电后利用飞轮的惯性储能带动发电机继续向计算机供电5s,以满足将当时的计算结果放入内存。于是就形成了在电动发电机同轴上加装飞轮的方案。在1967年我国为一研究所进口了一台“1900”计算机,配套的供电设备就是一台20kVA容量的UPS,如图1所示。这就是第一代UPS(Uninterruptible Power Supply)。所以UPS的问世就是为了保护计算机的程序不被破坏,因此UPS又有计算机孪生兄弟的美称。令人遗憾的是由于飞轮地转速太慢,只有1500r/min(频率为50Hz时)1800r/min(频率为60Hz时),所以需要飞轮的重量要非常大。如图1所示,20kVA就需要配5T的飞轮,那么400kVA就要配100T的巨大飞轮,这显然是不经济的,而且为了这区区5s更是令人乍舌。

幸好的是上个60年代可控硅(晶闸管)整流器问世了,这种半控器件可以调整输出电压的高低。于是专家们就以此推出了可以延长发电机在市电停电后的供电时间。其结构原理如图2所示。可控硅整流器输出电压给电池组充电和驱动直流电动机,以此带动同轴上的同步交流发电机为计算机供电,市电停电时蓄电池组就可继续维持直流电动机的旋转,使发电机不间断地向计算机供电。通过适当配置蓄电池组的容量就可以满足计算机各种后备时段的要求。随着可控硅整流器产品的进一步成熟,UPS制造商又推出了可控硅逆变器,代替了笨重的电动机和发电机。然而由于逆变电路是全桥结构所以输出的三根线都是火线,而用户实际用的是具有零线的三相四线制电压,必须加一个“Δ-Y”变压器才能投入使用。所以工频机UPS中的输出隔离变压器就是为了这个目的而加入的。时至今日这只“Δ-Y”变压器还牢牢地存在于工频机UPS体内。此外,由于工频机UPS工作在工业频率又有输出变压器,所以效率不足90%,六脉冲控制的可控硅整流器又是破坏电网波形的天然杀手,又必须加装谐波滤波器更导致效率下降。

无论如何,从此静态UPS和动态UPS开始分为两支,各自按照自己的方向谋求发展。
2 当今UPS的分类
目前,UPS供电系统分为两大类:动态(飞轮出能式)UPS和静态(静止变换式)UPS,如图3所示。动态UPS又分为接触轴承式和磁悬浮式。静态UPS又分为工频机UPS和高频机UPS:高频机UPS旗下又分为传统变换式(还包括再现互动式和三端口等)、Delta变换式和“高压直流”UPS。对静态UPS再此不作介绍。

3 飞轮储能式动态UPS
本来动态UPS是首先接受计算机需要的建议而率先问世的,结果在以计算机为基础的数据中心让静态UPS抢了风头。其原因是飞轮的转速仍未脱出1500~1800r/min的范畴,设备的体积很大并且噪声也令人难以接受,这种动态UPS只能用在不怕干扰的工业环境和空旷的地方。
其实动态UPS有着很多鲜为人知的优点。近年来,在国内外的数据中心、半导体芯片制造业、某些特种军用通信系统及政府的机要部门正日益关注和选用,其优点为:
①更进一步地提高UPS的效率。相关的资料显示,可将UPS的效率从工频机静态UPS的90%左右提高到飞轮UPS的98%;
②可将故障率明显偏高的蓄电池部件从UPS中彻底取消。不仅有助于提高UPS的可靠性,还可以大幅度地减少电源值班人员的维修工作量;
③由于动态UPS主要是金属结构,相对于静态UPS而言不太受温度环境的影响。可靠性明显提高;
④维护周期长,寿命长。减轻了维护人员的工作量。
对于这种飞轮动态UPS而言,当市电供电正常时,它在利用市电向用户供电的同时,还将部分电能同时通过具有电动机和发电机调控功能的“同步补偿机(G/M)”装置而以动能的形式储存在其巨大的飞轮中。
此时,对于其“同步补偿机(G/M)”装置而言,不仅承担着短时效的能量转换调控功能,将来自市电的电能变换成储存在飞轮中的机械能。而且,它还承担着自动稳压以及对可能来自市电电网和用电设备所产生的谐波电流执行自动补偿的调控功能,就是将输出电流的谐波含量THDI值实时地调节到趋于零。当市电供电中断时,它可以利用原来储存其飞轮中的巨大动能的惯性驱动同步补偿机(G/M)装置继续旋转。此时)装置将自动承担着发电机的调控功能,从而确保对各种用电设备的连续不间断地供电。能够将飞轮UPS推向新的实用阶段的推动因素有:
①对于当今的技术相当成熟的电力工业而言,由于普遍采用了由信息化管理的、智能化供电的电网调度技术,以及在用户的供电系统中采用ATS开关在双路市电输入电源之间自动执行“切投调控”操作保护性的设计方案,在市电输入供电系统中,发生长时间的停电事故的几率是极低的。这样一来,就为依靠动能型的惯性能量来确保负载的连续供电的飞轮UPS得到实际应用创造出极为有利的运行条件。
根据美国Electric Power Research Institute对美国供电电网的调查发现,90%以上停电事故的持续期一般小于10s;根据RWE公司对欧洲9个国家的126个供电电网的调查发现:95%以上的停电事故的持续期一般小于3s。
对于在两路市电输入电源之间采用ATS开关自动切换调控技术的用户设备而言,当其优先供电的输入电源发生停电事故时,其另一路备用电源可在小于1~3s的时间间隔内恢复向用电设备供电。
理论上讲,ATS开关会导致输入电源出现几十到上百毫秒的供电中断,这是因为ATS开关的典型切换时间为≤200ms左右。导致ATS开关的总切换时间可能长达几秒的原因是:为了防止因市电电网发生偶发性闪断而导致ATS开关在两路市电电源之间执行不必要地、频繁地误切换动作,从而导致在用电设备的输入端产生令人厌烦的尖峰型电源干扰从而导致ATS开关使用寿命缩短。为此,有必要人为地为ATS开关设置适当延时切换保护功能。所以,对于具备有“双总线输入”供电条件的用户而言,是可以通过选用飞轮UPS的技术途径来省去配置体积庞大、故障率偏高和维护量偏大的蓄电池组。
综上所述,既然在供电电网中,发生长时间停电故障的几率是极低的。这样一来,就为能充分发挥出飞轮UPS对可能来自市电电网的瞬态电压波动、闪断、瞬态干扰、谐波电流执行实时补偿型调控功能的技术优势奠定下坚实的技术基础。
②与传统双变换在线式的静态UPS相比,飞轮UPS具有如下明显的技术优势,如表1所示为目前动态UPS和静态UPS的大概对比。而且动态UPS在整机效率、输入功率因数、负载功率因数、允许的工作温度范围、无需电池组的维护和可靠性高等技术性能上均明显地优于双变换在线式的静态UPS。在此需要说明的是,对于飞轮UPS供电系统而言,其平均整体效率要比工频机静态UPS的效率高4%~5%。来自美国ActivePower公司的真空磁悬浮飞轮UPS能效甚至可提高6%。这对于当今能源价格增幅较大的背景下,其节能降耗和绿化环保的效应尤为明显。采用飞轮储能的动态UPS可以更加节能的另一个原因是:由于它自带有风冷电扇及无需配置要求环境温度小于25℃的电池组。

因而,再也无需为UPS机房配置具有高耗运行特性的空调机组。但应说明的是,仍需为它配置必要的热风排除系统。
正因为动态UPS有着这些特点,飞轮储能的技术也在不断发展。好多公司都在作着这方面的努力。比如荷兰的动态UPS飞轮的速度开始提高,打破了低速旋转飞轮的僵局。如图4所示就是该国公司推出的一种Hitec飞轮储能式动态UPS,图5是160kVA的原理结构图。该系统由燃油发动机、离合器、感应耦合器和同步发电机构成。图5表示的是UPS在市电模式下的工作情况。当市电正常供电时输入断路器Q1和输出断路器Q2闭合,市电经过Q1、电感L和Q2向负载供电,这时同步发电机G作同步电动机旋转呈电容性,正好和电感L构成LC滤波器,使输出电压清洁无干扰。

此时由于断路器也在闭合,市电电压驱动感应耦合器的外转子1500r/min(市电为50Hz时)~1800r/mi(市电为60Hz时)运转,这时整流器Z将整流的直流电压送入感应耦合器中的直流励磁绕组励磁来驱动内转子相对于外转子1500r/min作4500r/min旋转,于是内转子对外的绝对转速就达到了6000r/min。这样一来160kVA的飞轮重量才1700(lb),大约772kg。这比起50kVA/5000kg来重量不足原来的四十分之一,这是多么大的进步!其中断路器Q3和静态UPS一样,是维修旁路开关。在这种工作状态下离合器是分离的,燃油发电机处于熄火状态。
当市电停电时,UPS的同步发电机马上转为发电状态,继续向负载不间断地供电。同时断开Q1和Q4,这时感应耦合器中的飞轮带动同轴的同步发电机继续旋转,燃油发动机开始起动很快就达到了额定转数,感应耦合器中的飞轮由于放出能量转速逐步降低,当降低到与发动机的转数同步时离合器啮合,此时发动机开始接替储能飞轮的工作。一直到市电恢复或需要停机时为止,如图6所示。

动态UPS使用受阻还有一个原因,那就是飞轮储能的时间太短,只有15s。这和几十分钟(>1000s)配备电池组的静态UPS比起来,在时间上有天渊之别。也就是说和人们习惯认定的时间相差甚远,使用户望之却步。因此有的UPS制造商又在这方面开动脑筋。推出后备时间更长的动态UPS。图7就是德国PILLER公司推出的一款利用油机作为后备的长延时动态UPS。这个系统的结构由三部分组成,Q1第一路是市电经电感滤波后送入AC/AC稳压器,再过作电动机旋传的同步补偿发电机(G/M)给重要负载供电;同时内部的储能飞轮作飞速旋转,开始除能;第二路是Q4,这一路是一般的常用UPS结构,它的作用是对第一路的输出电压进行功率补偿;第三路Q6,在正常情况下开始首连负载由市电直接供电,当第一和第二路输出实现与市电同步锁相后断路器Q5闭合。当市电断电或异常时Q1、Q4、Q5和Q6断开,同步补偿发电机(G/M)在储能飞轮的带动下转为同步发电机。另外一路Q2是众所周知的自动旁路,一旦系统过载或主机系统出现问题,负载就被直接接通市电。

如前面所述,目前一般动态UPS飞轮给出的后备时间大都在15s左右,换言之,后备发动机必须在这个时间之内接替飞轮带动发电机的工作。因此,就出现了一个问题,即为了抓紧时间起动燃油发动机,只要市电电压超出设定范围,即使这个时间很短发动机也必须马上启动,也就是说市电电压超限和油机起动之间不允许有一点时间间隔,怕的是启动时间不够。这在很多情况下就导致了误动作。
比如在雷雨天气雷电频频造成电网瞬时的超限波动,那么燃油发动机也会频繁起动和关机,这就极大地损害了机器的转动部件,缩短了机器的寿命。为此,PILLER又推出了延长飞轮储能时间的方案,如图8所示。
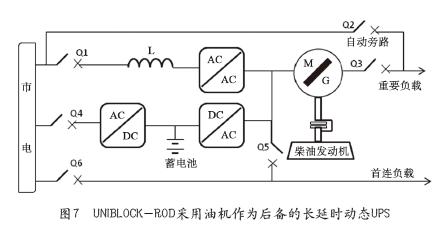
图8(a)所示为PILLER延长飞轮储能时间的电池方案。当市电断电后可控硅变流器开始将电池组的直流电变换成和市电电压相同的值,继续驱动飞轮不减速旋转,从而带动同轴上的发电机继续供电,当电池能量达到下限值时,飞轮才开始释放能量作减速运转,一直到燃油发动机接替它的工作。
图8(a)所示电池增时模式下所增加后备时间的长短由所选电池容量的大小来决定,图8(b)所示是另一种用附加飞轮延长后备时间的方案。在这里M/G也是电动发电机设备,市电正常供电时M/G作同步电动机模式旋转,市电电压异常时马上转为直流发电机模式,经可控硅变流器开始将直流电变换成和市电电压相同的值,继续驱动飞轮不减速旋转,从而带动同轴上的发电机继续供电,当直流电机储能达到下限值时,飞轮才开始释放能量作减速运转,一直到燃油发动机接替它的工作。图8(b)所示飞轮电机增时模式下所增加后备时间的长短由所选飞轮电机的大小来决定。但考虑到各方面的原因所限此二者都不会取得太大。
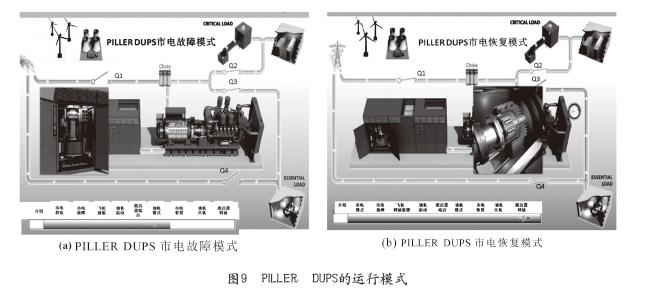
图9(a)给出了PILLERDUPS市电故障模式。当市电异常时通往关键负载(CRITICAL LOAD)和重要负载(ESSENTIAL LOAD)的输入断路器Q1和Q4断开,Q3闭合,通过飞轮的延时转换切换到油机模式由后备发电机向关键负载与重要负载供电;当市电恢复后如图9(b)所示,输入断路器Q1和Q4闭合,Q3断开,重新进入市电模式。
编辑:Harris

