 |
||
咨询QQ: 杂志订阅 编辑 网管 培训班 市场部 发行部 杂志订阅 编辑 网管 培训班 市场部 发行部电话服务:  010-82024981 010-82024981 | ||
 |
||


一、引言
无人飞行器不论是在当前的俄乌战争和巴以冲突中,表现出的多样作战场景和方式,还是新兴的“低空经济”,已然成为全球主要经济体角逐的新领域。无人飞行器主要分固定翼无人飞行器和旋翼无人飞行器两类,采用传统内燃动力或电动机动力推进系统,或者油电混合动力推进系统。二者均由机械部件旋转产生动力,容易造成机械疲劳,并伴随产生巨大的工作噪声,燃烧排放大量高温气体,红外特征显著。随着全电动无人飞行器的商业化,一种新型电推进技术的研究方兴未艾,即电空气动力推进(Electroaerodynamic propulsion-EAD推进)。
EAD推进技术是基于气体放电产生和控制的低温等离子体,通过带电粒子在电场作用下对空气做功形成离子风(ionwind),进而产生推力。Masuyama[1]通过实验验证了EAD推进器的推力-功率比可达到110N/kW,这与现代喷气发动机的推力-功率比相当。而且与传统的机械推进方式相比,EAD推进技术具有结构简单、无运动部件、静音和响应速度快、功耗低和寿命长等特点,为航空器设计提供了新的可能性,特别是对于隐身性能要求更高的军用无人飞行器的发展具有重要意义。
2018年,麻省理工学院Xuetal.[2]研究的EAD推进固定翼无人飞行器,在室内完成了10秒约60m的稳定飞行试验,是航空业的重要里程碑,再次掀起了人们对电空气动力学和离子风(ionwind)特性的研究热潮[2-8],对临近空间无人飞行器推进系统也有巨大的应用价值和潜能[9-12]。
二、EAD推进机理
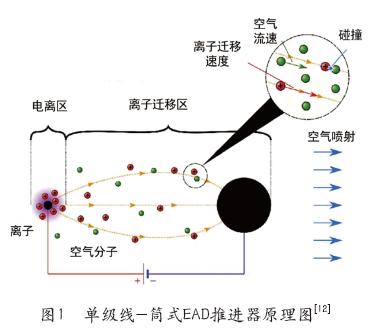
本文介绍的EAD推进技术主要基于电晕放电机理。如图1所示非对称结构的线-筒式电极,在电晕放电过程中,通过施加正高电压,电离区附近的空气分子被电离成包含离子和电子的等离子体。随后在电场作用下,等离子体中的带正电粒子在离子迁移区加速,形成定向运动—离子风,与周围的中性空气分子发生碰撞并进行动量交换,产生与离子风方向相反的推力。电晕离子风的形成机制涉及到静电场、空间电荷场以及流场的耦合,因此整个系统具有较高的非线性。
为了高效地处理电晕放电流体中的多物理场耦合问题,国内外学者基于COMSOL Multiphysics、ANSYS、MATLAB等商用软件搭建了不同的仿真模型。其中,常用的离子风模拟方法是基于Kaptzov假设的单极性离子迁移模型[13]。该模型忽略了电离区的复杂反应,通过求解泊松方程(1)、电流连续性方程(2)和纳维-斯托克斯方程(3),可以得到迁移区内的电场、电荷密度以及EAD推力的空间分布情况。
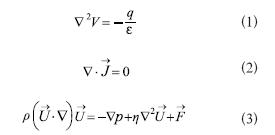
其中,V是电势,q是空间电荷密度,ε是气体介电常数,电场表示为=;忽略空气流速和离子扩散,电流密度表示为,μ为离子迁移率;ρ、p和η分别是气体密度、静压和动力学粘度,是离子风速度,=q为库仑力,其反作用力即为EAD推力。
Lengetal.[14]通过对单级线-筒式推进结构的理论分析,EAD推力主要是作用在两个电极上的静电力、压力阻力和粘滞曳力的合力(如图2所示)。静电力是由电场对带电粒子的作用产生的库仑力;压力阻力和粘滞曳力属于空气动力学力,是离子风经过电极时产生的阻力。

三、EAD推进器性能参数
近年来,专注于EAD推进技术的研究学者通过仿真和实验研究了推力、推功比、单级推进器电极结构型式、多级推进器阵列型式等影响推进器性能的参数[2,3,7,14-18]。
1.推力
许多学者都以单级的线-翼面结构的推进装置仿真研究EAD推力,在静态条件下,忽略空气动力学阻力影响。因此,EAD推力[2,14,15]取决于电荷密度、放电体积和电场强度,如式(4),其中I为电晕电流强度、d为电极间隙、μi为离子迁移率(平均海平面的空气中离子迁移率约为2×10-4m2/V•s[14])。

研究结果表明[1,7,8,14],线电极曲率越大,在相同电压下产生的推力FEAD越大。其原因是施加电压和电极间隙一定,线电极直径减小会增大其周围场强,电离度增大,产生的带电粒子增多,电晕电流和推力随之增大。同样,对于同一个EAD电极,放电电流随着施加电压的增加而增加,推力会随之增大。此外,不同的线电极材料由于其不同的导电率,也会对推力有一定影响。
2.推功比
推功比(Thrust-to-powerratio)[1]是衡量EAD推进器性能的一个重要参数,关系推进系统的效率。它表示单位功率产生的推力,如式(5)。推功比大表明推进器在消耗较少能量的情况下能产生更多的推力,这对于提高飞行器的效率和航程至关重要。

研究结果表明[8,14],电极间隙增大,在相同电压下推功比会增大。但是,在研究过程中发现推力与推功比存在“此消彼长”的关系。其主要表现为减小线电极直径,能够获得大的推力,然而推力的增长幅度小于功率消耗的增长幅度,因此,为增大推力而追求减小线电极直径,就会以增加功率消耗为代价,导致推功比下降。当前的研究重点之一就是同时满足较大的推力以及较高的推功比。
3。电极结构
对于单级推进器,不同形状电极(针-环、针-网、针-板、线-棒、线-板、锯齿-网、锯齿-板等)、电极放电间隙d、电极组成型式都会影响EAD推力特性[7,14,16,19]。
研究表明,EAD推力的形成与电离极和集电极都有密切的关系。减小电离极曲率半径可以降低电晕放电的起始电压,使其周围的局部场强增大,放电电流强度增大,从而推力增大。同样,施加相同电压,减小电极间隙,使电极间场强增大,电离强度增强,使电晕电流增大,推力则随之增大。因此,施加电压不变,缩短电极间距或者减小电极间隙,可以有效增大推力[8]。其次,集电极的几何结构会影响带电粒子的定向运动以及动量交换,进而影响产生推力[8,16]。
为了提高单级推进器推力,有学者研究了不同单级电极组成结构(单高压电离极-多集电极)。Masuyamaetal.[1]研究了单电离极-双纵向布置集电极结构,在产生放电电流方面比单对单电极结构的推进器更有效,使产生相等推力所需的总电压变小。然而,由于中间电极捕集离子导致的能量损失,与同等电极长度的单对单电极推进器相比,其推功比降低。而Grosseetal.[14]研究了单电离极-双横向布置集电极结构,在一定的推力下,可以实现更高效的推功比。这对于提高飞机的飞行性能至关重要。
4.多级推进结构
EAD无人飞行器的应用必然是由多组单级推进器以阵列型式构成,而多级阵列电极的电场和空间电荷会相互影响,电极阵列产生的总电晕电流和推力不等于单组电极的算术叠加[8]。因此,多组电极阵列结构是无人飞行器关键性能参数。
有研究人员[17]在这方面做了大量工作,提出了一种多级涵道式EAD推进器,旨在提高推力密度。研究结果显示,与单级推进器相比,10级推进器推力提高了5.6倍。在保持高推力的同时,能够实现较低的功率消耗。尽管这种多级推进器具有提高推力密度的潜力,但仍需克服一些挑战,如反向放电[20]、电极退化。
四、EAD无人飞行器关键技术
Xuetal.和欧阳芳相等[2,8]已经通过实验,将EAD推进应用到了固定翼无人飞行器上。对于无人飞行器来说,高功率密度机载动力电源及机身结构材料的轻量化、飞控系统等是EAD无人飞行器由理论到应用需要突破的关键技术。
推进系统(包括动力电源)是构成无人飞行器重量的主要部分,因此,其性能显著影响无人飞行器的性能和自主性[21]。EAD系统因其轻量化需求,对无人飞行器(UAV)的电源系统提出了严格的要求。Zhaoetal.[22]研究结果表明其设计的轻量级HVPS在满负荷下能够提供40.1kV/619.4W的输出,整机重量为423.9g,比功率达到了设计目标。不仅提升了EAD-UAVs的电源系统的轻量化水平,还为高压电源的磁集成技术提供了新的设计理念和方法,有助于推动电空气动力学推进技术在无人飞行器等领域的应用发展。还有研究者[23]开发了一种无线能量传输技术,制作机载无线电源模块,实现了EAD无人飞行器能够携带9克有效载荷的自主飞行。这种技术使用了一个静态发射器和安装在飞行器上的接收器,允许以高能量密度微波传输电力,无需携带重型电池。
机身系统可以采用如碳纤维、PI/PMI泡沫等轻质高强度复合材料制造,以减轻质量,提高飞行推力加速度,而且无人飞行器结构部件可以运用金属/非金属3D打印技术完成。
飞控系统由遥控接收机和机载控制器组成,置于机身内,用于控制推进系统供电的通断,以及对无人飞行器飞行姿态等操纵。
五、总结与展望
EAD推进技术是近年来小型无人飞行器,特别是微型无人飞行器领域的一个重要研究方向。它利用电离空气产生的推力来驱动飞行器。这种技术结合了电场和流场的耦合作用,可以产生更大的推力密度,通过将电能转化为机械能来产生推力,具有高效、低噪音和低排放的特点。
然而,EAD推进技术仍然面临一些挑战。首先,如何提高推进效率是研究重点。此外,如何在高空低气压、低温、高湿等复杂的大气环境中确保推进系统的稳定运行也是一个关键问题。
今后研究方向可以从以下几个方面进行探索:首先,进一步优化EAD推进器的结构设计,提高其效率和可靠性;其次,开发适用于不同环境和应用的EAD推进器;最后,加强实验和数值模拟研究,以更深入地理解EAD推进的机理和性能。
参考文献
[1]Masuyama,K.,& Barrett,S.R.H.On the performance of electrohydrodynamic propulsion[J].Proceedings of the Royal Society A,469,2013.
[2]Xu Haofeng,He Yiou,Strobel K L,et al.Flight of an aeroplane with solid-state propulsion[J].Nature,2018,563(7732): 532-535.
[3]Drew D S,Lambert N O,Schindler C B,et al.Toward controlled flight of the ionocraft: a flying microrobot using electrohydrodynamic thrust with onboard sensing and no moving parts[J].IEEE Robotics and Automation Letters,2018,3(4): 2807-2813.
[4]Vladislav Yu.Khomich,Igor E.Rebrov,In-atmosphere electrohydrodynamic propulsion aircraft with wireless supply onboard[J].Journal of Electrostatics, 95(2018) 1-12.
[5]霍明英,于泽,林桐等.等离子推进无人飞行器的电空气动力学研究[J].飞控与探测, 2019,2(03): 38-45.
[6]张明,李丁晨,李传等.离子风的应用研究进展[J].电工技术学报, 2021,36(13): 2749-2766.
[7]Ping Huang, Zhuoyue Xie, Peng Liu, Dapeng Leng, Jinpao Zheng, and Sen Wang, Ionic Wind Simulation of Wire-Aluminum Foil Electrode Structure Lifter in 2-D Space[J]. IEEE TRANSACTIONS ON PLASMA SCIENCE, VOL.50, NO.3, MARCH 2022.
[ 8 ] 欧阳芳相,陈赦,许冬冬等.离子风飞机推进电极阵列的推力影响因素[J ].中国电机工程学报,2022,42(08):3098-3107.
[9]马家兴,全荣辉,滕海山等.基于离子风电推进系统的平流层飞艇飞行轨迹分析[J ].宇航学报,2021,42(05):642-649.
[10]Zhou LW, Wei LQ,Zhou DS et al. The characteristics of ion wind thruster based on dielectric barrier discharge in near space[J]. Vacuum, vol.195, 2021.
[11]Zhou LW,Wei LQ, Song N, et al.Effect of dynamic permittivity in low-pressure environment on performance of surface dielectric barrier discharge ion wind thruster[J]. Vacuum: Technology Applications & Ion Physics: The International Journal & Abstracting Service for Vacuum Science & Technology, 2022:201.
[12]全荣辉,王博,姚韵嘉.低气压离子风推进器仿真与实验[J]. 气体物理, 2023, 8(01): 26-35.
[13]CHEN She,ZHU Yifei,TU Jingyi,et al.Numerical investigation of an electroaerodynamic driven aeroplane: electrical properties,ionic wind and flight performance[J]. Journal of Physics D:Applied Physics,2019,52(36): 365203.
[14]Grosse, S., Moreau, E., & Binder, N. Modeling of the Flight Performance of a Plasma-Propelled Drone: Limitations and Prospects[J]. Drones, 8, 114, 2024.
[15]Leng, J., Liu, Z., Qi, M., & Yan, X. On the Mechanisms of Electroaerodynamic Propulsion via Force Analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, Vol.60, No.3, 3417-3426, June 2024.
[16]刘宇曦,廖胤权,耿金越,等.基于电晕放电的离子风推进装置推力性能[J].南昌大学学报(理科版),2022,46(2):154-159.
[17]Gomez-Vega, N., Brown, A., Xu, H., & Barrett, S.R. H.Model of Multistaged Ducted Thrusters for High-Thrust-Density Electroaerodynamic Propulsion[J]. AIAA Journal, 61(2),767-779,2023.
[18]Nelson, C. L., & Drew, D. S. High Aspect Ratio Multi-stage Ducted Electroaerodynamic Thrusters for Micro Air Vehicle Propulsion[J]. IEEE Robotics and Automation Letters. Advance online publication (2023).
[19]Wen Su,Zhe Yan,Changhong Wang,Zhixuan Liang,Lixuan Chen, Xintong Chen.Experimental study on ionwind flow induced by sawtooth electrode[J].International Communications in Heat and Mass Transfer,152(2024),107284.
[20]Gomez-Vega,N.,Kambhampaty,J.D.,& Barrett,S.R.H.Mitigating reverse emission in electroaerodynamic thrusters[J].Journal of Physics D:Applied Physics,55(2022), 505202.
[21]Amici, C., Ceresoli, F., Pasetti, M., Saponi, M., Tiboni, M., Zanoni, S. Review of Propulsion System Design Strategies for Unmanned Aerial Vehicles[J]. Appl. Sci. 2021, 11, 5209.
[22]ZHAO,Z.,ZHU,J.,DAI,Y.-X.,WANG,J.,YANG,Y . C . , P E N G , Z . S . , X U , Q . M . , N I N G , Y . , a n d H E , S.M.Lightweight Design of Magnetic Integrated Transformer for High Voltage Power Supply in Electro- Aerodynamic Propulsion System[J].IEEE Transactions on Power Electronics,Vol.38,No.9,pp.10501-10513, September 2023.
[23]Vladislav Yu.Khomich,Igor E.Rebrov,In-atmosphere electrohydrodynamic propulsion aircraft with wireless supply onboard[J].Journal of Electrostatics 95 (2018) 1-12.
作者简介
尹晓峰,主要研究无人运输装备设备建设研究。
向禹舟,主要从事无人机运输方向研究。
编辑:Harris

